一.无人机拍摄建模
1.1 简介
随着航空摄影技术的不断发展,无人机倾斜摄影测量技术出现了。传统航空摄影采用正摄角度采集影像,而倾斜摄影测量运用多角度相机同步获取地面物体各个角度高分辨率的航摄影像。
无人机拍摄建模是指使用无人机拍摄航拍图像,后利用照片建模软件对这些二维航拍图像进行建模处理,最终生成三维数字模型的过程。其中拍摄航拍图像以制作模型和地图的过程也称为航空摄影测量。
相比测绘全站仪、卫星遥感、点云等传统的测量方式,无人机拍摄建模(特别是采用倾斜摄影测量技术)具有大范围、高精度、高清晰等优势。

1.2 拍摄流程
1.2.1 准备工作
1.了解场地基本信息:
在规划航线之前,首先要了解场地。应提前了解场地的范围、地貌、树木遮挡情况、建筑和树木高度等,这将为后续的规划航线提供帮助。若有精度要求,则应根据地面分辨率,计算相对航高。
2.确定飞行时间:
正午地面的阴影最小,此时的光照强度大且太阳高度角小,若天气条件不好会导致采集到的建筑物阴面空中三角测量匹配精度差、纹理模糊且亮度低,会影响建模的最终效果。
最佳拍摄条件为:在光线充足且风速较小的天气的10点-16点。
3.硬件设备:
保证无人机电池、手柄和手机电量充足。
4.航线规划:
在介绍航线规划时,首先明确一个基本情况:为了保证建模软件识别的准确性,航拍的照片之间需要保证一定的重叠率,结合无人机拍摄就产生了两个新概念——旁向重叠率和航向重叠率。
航向重叠率:无人机在一条航线前进拍照时,前后两张照片的重叠率。
旁向重叠率:无人机在两条平行航线拍照时,位置相近的两张照片的重叠率。
在实际作业中:设定的重叠度一般为:航向80%,旁向75-80%。

1.2.2 飞行拍摄
1.航线规划:分为软件规划和自主规划两种情况。
(1)软件规划航线:航线规划类软件的功能都很类似,以下介绍使用较多的几种:
① Altizure(倒闭了,倒闭前使用者最多,网上有卖之前的安装包,ios版本的稳定性大于Android版本)
② DJI GS pro(收费,较贵,且不是所有的无人机机型都支持)
③ Rainbow无人机飞行软件(口碑还好,前几次使用免费)
该类软件一般操作流程如下:
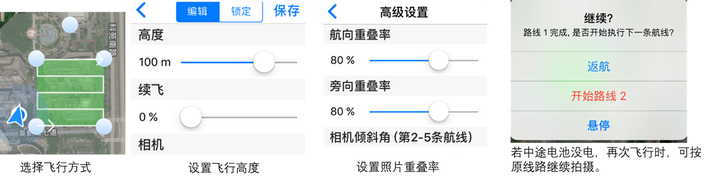
(2)自主规划航线:
①确定拍摄高度:原则上离物体越近,建模精细度越高,根据实际情况确定实际高度。
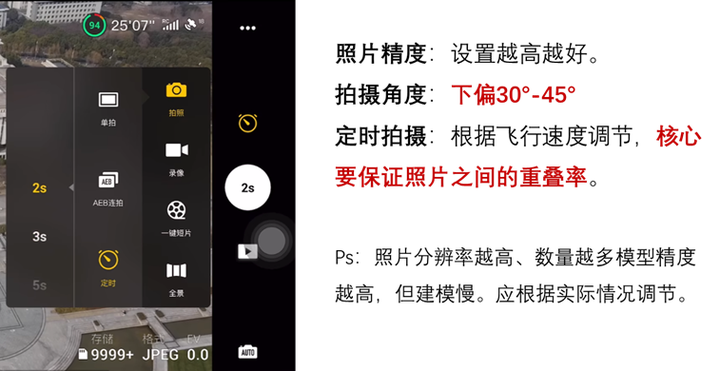
②调节飞行参数:照片分辨率、拍摄角度、定时拍摄等。
③航线规划:在保证每张照片的重叠率的情况下进行航线规划。如果场地很大,考虑到一次性拍摄不全,应进行区域划分。
·确定飞行方式:常用飞行方法有环绕法、交叠环绕法和田字法。环绕法即围绕物体以不同高度进行连续拍摄。
环绕法适合周围没有飞行遮挡的建模对象,如果有遮挡,采用交叠环绕法和田字法。

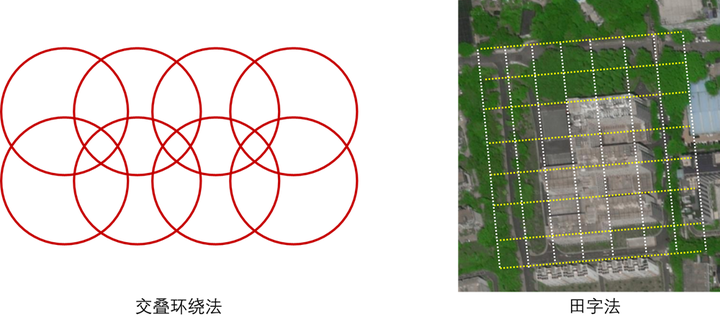
交叠环绕法对无人机新手来说操作难度相对较高,田字法相对简单。
注:田字法介绍见后一部分"飞行航线规划实例"。
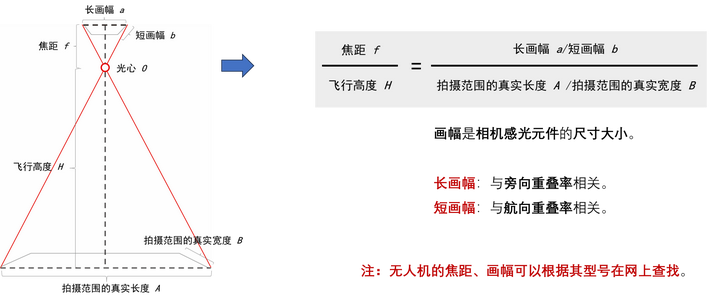
·飞行航线规划:无人机拍摄的基本计算原理如下:
·飞行航线规划实例:以某高校教学楼为例(建筑周围有高大的乔木,无法进行环绕拍摄,交叠拍摄对新手较为困难,最终选择田字法拍摄。)
1)教学楼高约25米,设定飞行高度为100米, 设置航向、旁向重叠率为80%。
若无人机的:长画幅为35mm,短画幅为24mm,焦距为22mm,则:

根据算出的旁向间隔(31m)在地图上进行路线规划。采用五向飞行法最为准确,所以需要四条线路、五个方向飞行(1条正摄数据+4条四个方向的倾斜摄影数据)
注:五向飞行法:在一条路线的拍摄过程中,无人机的摄像头保持平行于大地水准面方向进行拍摄,在其他四个方向的拍摄中,摄像头保持某一方向不变进行"几"字绕行。下图为实例:

在地图上简单划分30m✖30m的网格之后,根据场地实际情况再次调整,将航线调整到建筑、构筑边界时,航拍时更容易定位。
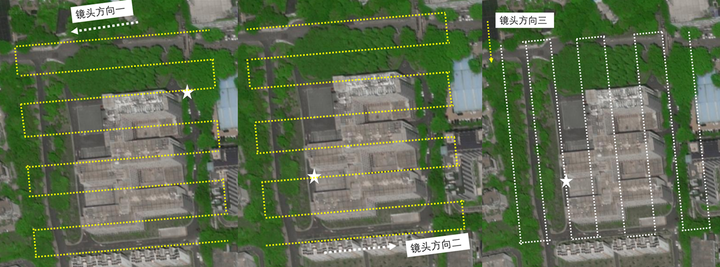
三个不同的镜头方向。
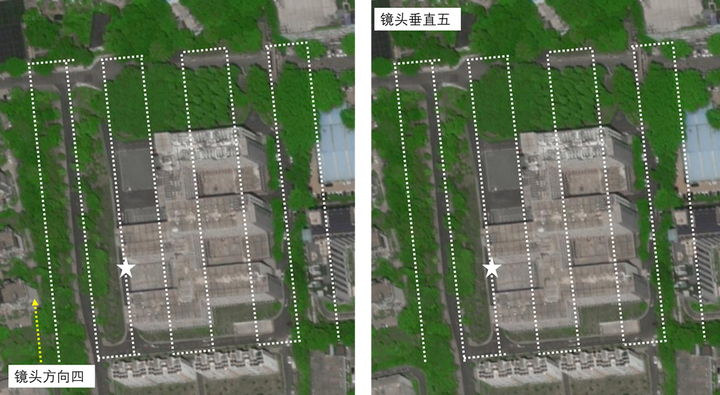
第四个镜头方向加正摄。
前期拍摄过程介绍到此结束,下面介绍建模过程。
二.建模
2.1 无人机摄像建模软件介绍
1.常用软件如下:
· Pix4D Mapper:非开源商业软件。使用者较多,价格高,操作相对容易。
· Context Capture(原smart 3d):非开源软件。国内使用者较多,可以分块处理模型,建模精度较高。
· Photoscan/Metashape:非开源软件,使用者最多。空中三角测量计算比context capture好,但是建模精度低于context capture。
· 大疆智图:大疆官方非开源软件,收费,挺贵,操作简单。
注:context capture分块建模的操作对电脑配置比较友好,所以笔者最终选择了context capture建模,后续文章中介绍的建模软件也为context capture。
2.2 context capture建模
1.建模流程:
(1)打开黑色的Context Capture Master:
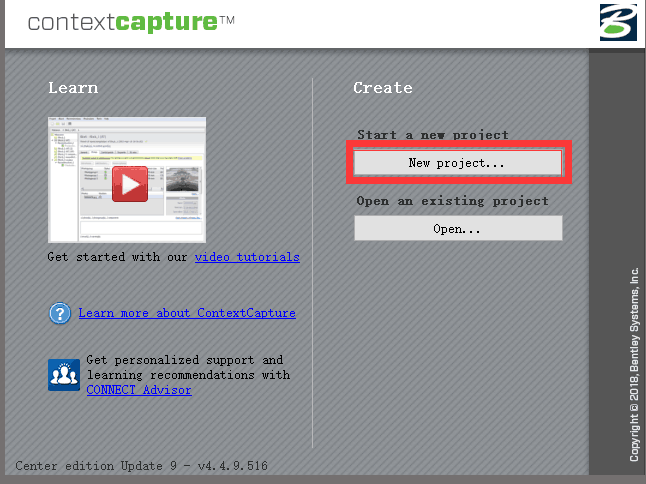
新建项目
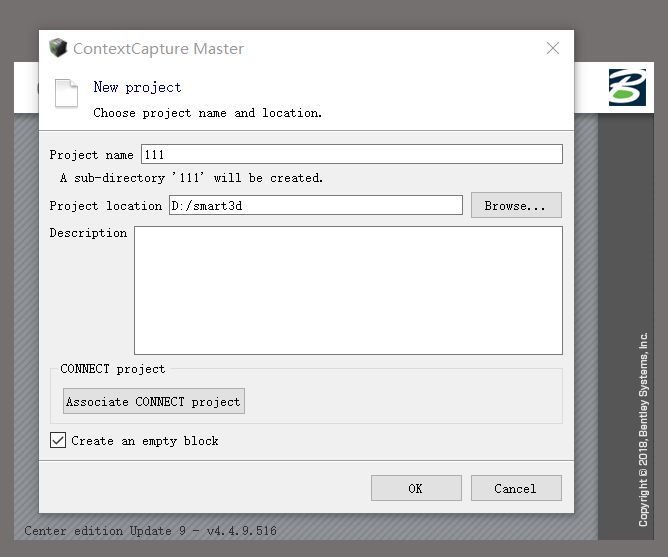
输入文件名和储存地点
(2)添加图片:
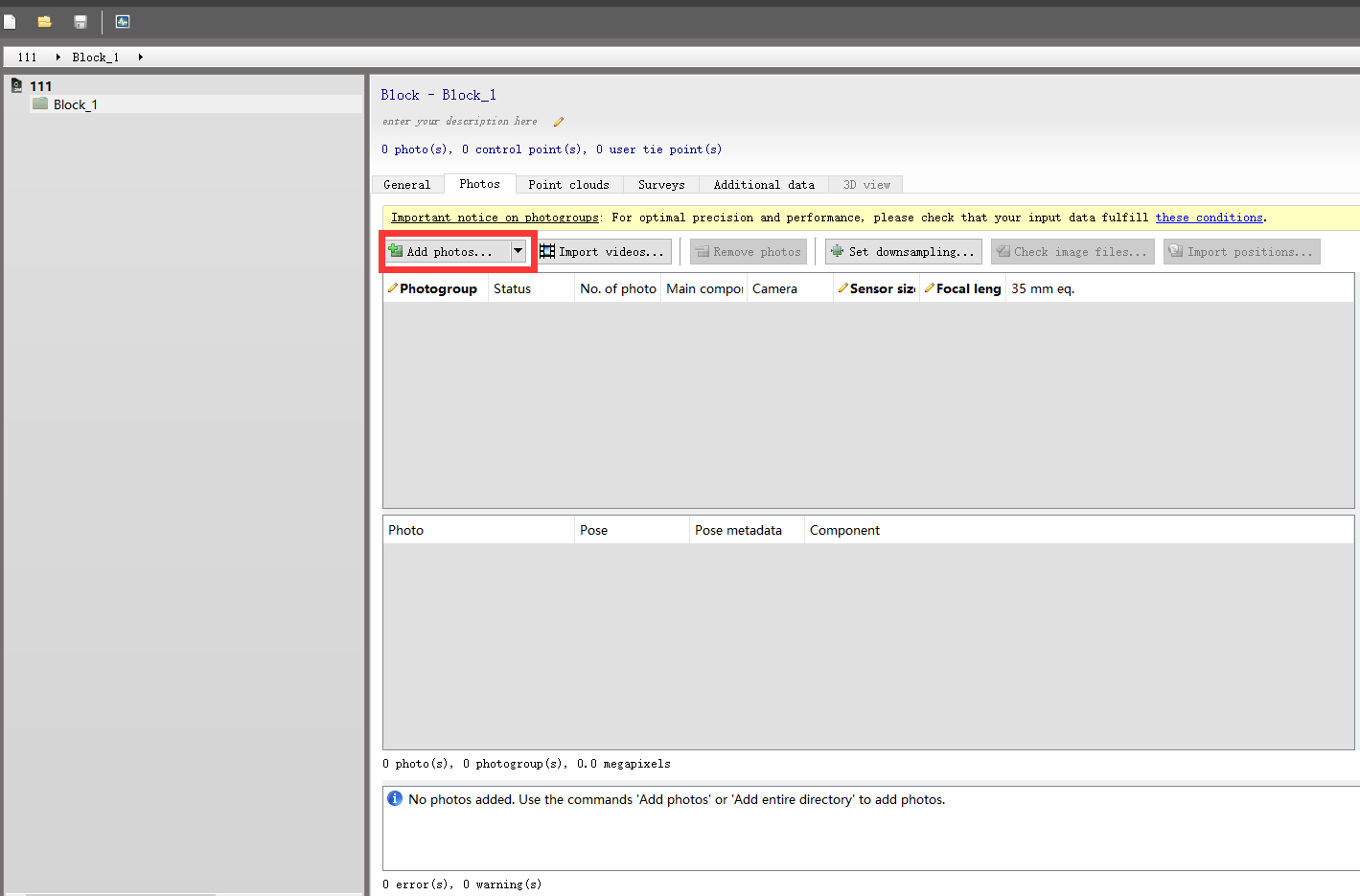
添加图片
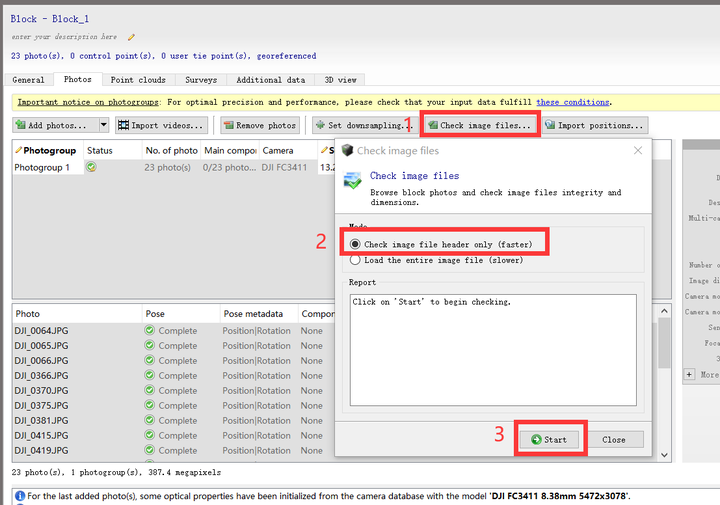
检查照片质量,看有效图片数量是否和添加的照片数量一致
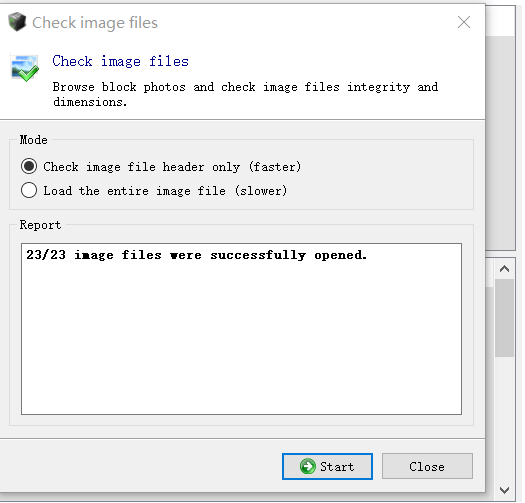
检查结果显示23张照片都没有问题,如果有问题则检查照片是否损坏,提前评估损坏的照片是否会对建模造成影响。
(3)提交空中三角测量计算:

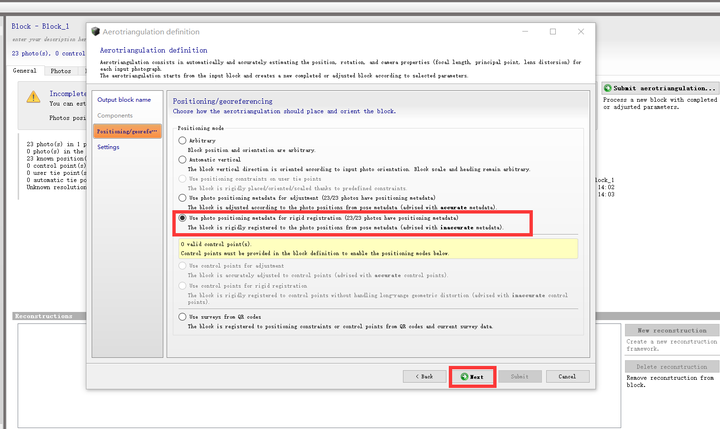
没有提前布设像控点的,选择该项。
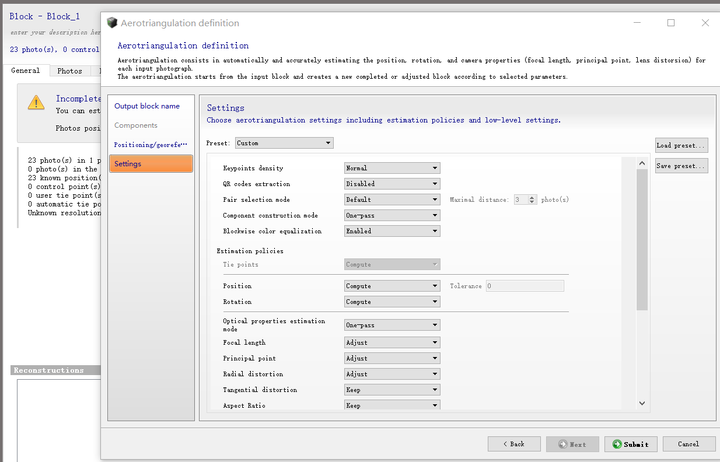
按照默认选项,然后submit
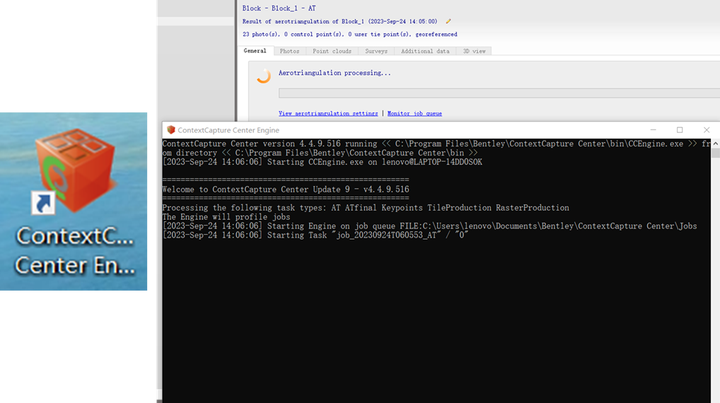
打开橙色的engine等待计算结果(engine必须打开,否则空三计算和建模都无法进行)
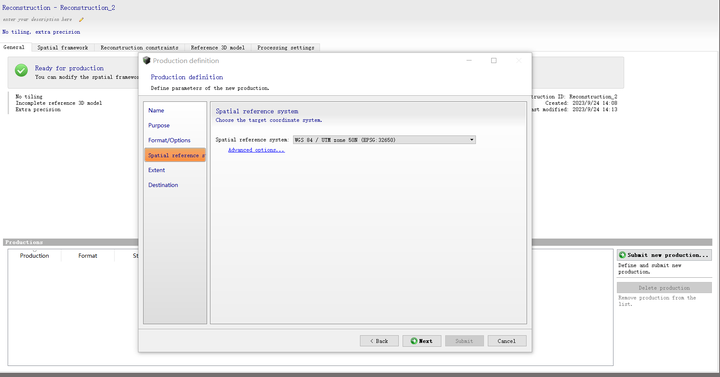
(4)新建项目
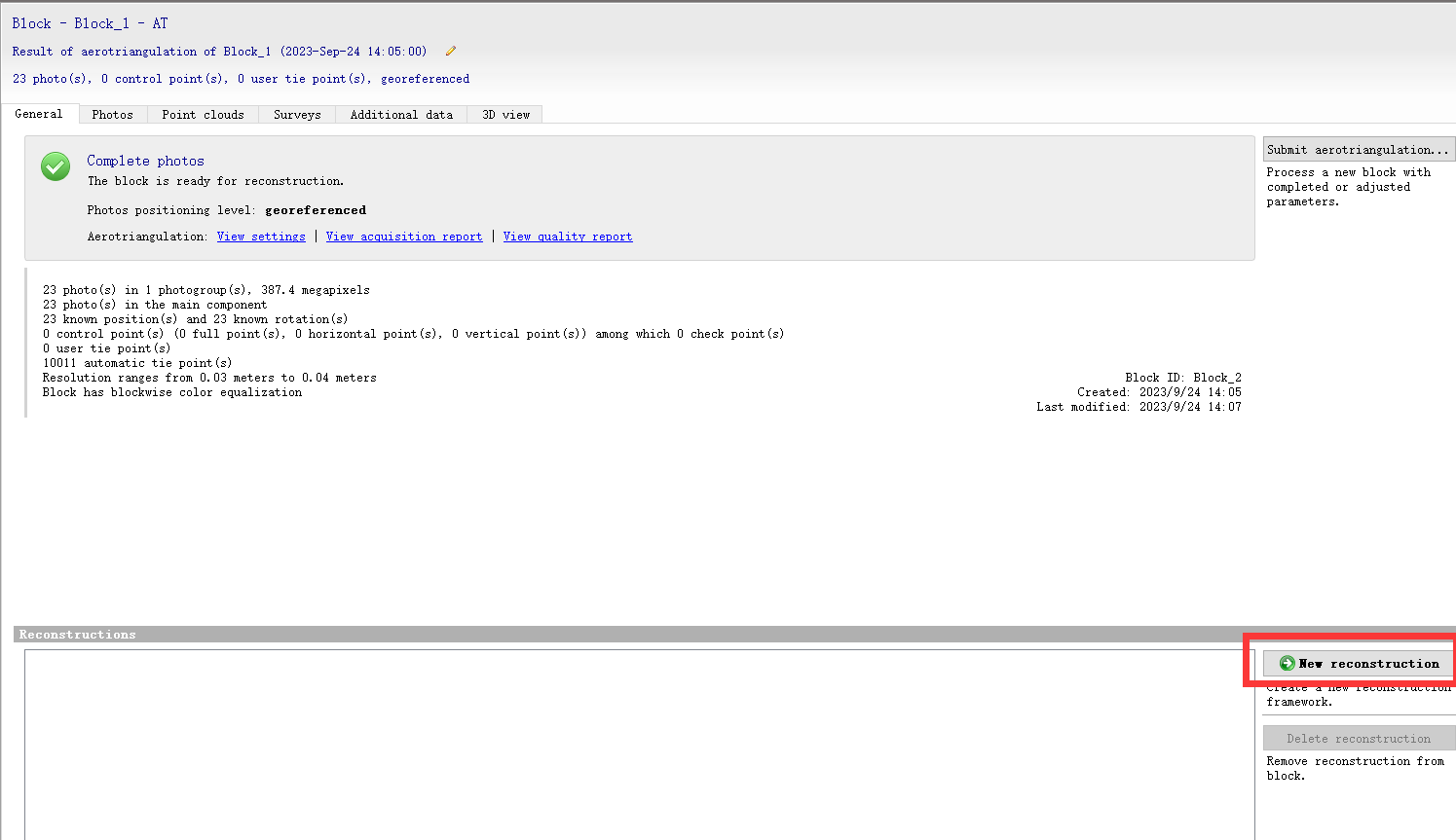
点击 new construction
①点击"spatial framework" ;②选择坐标系 ;③调节模型范围(建议修改模型范围,减少建模时间) ;④根据自己电脑的自带的RAM调节"mode"选项和"tile size"。
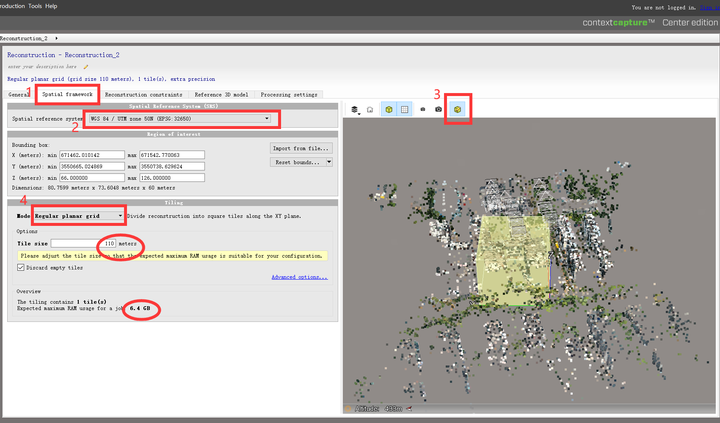
笔者电脑的机带RAM为8GB,大于模型的6.4GB,所以可以不分块(no tiling)。
若分块:选择"regular planar grid",调节"tile size",使得单个模型的最大RAM小于电脑自带的RAM。
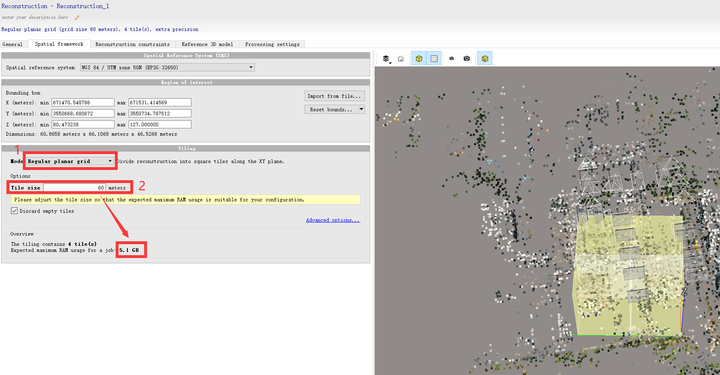
分块建模操作过程
注:电脑RAM查找方式:“此电脑”——右击"属性"
(5)提交新的项目
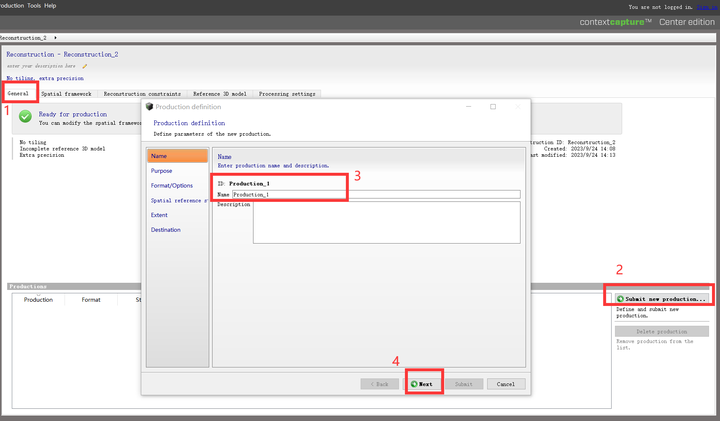
①点击“General”; ②“submit new production”;③命名;④点击"next"
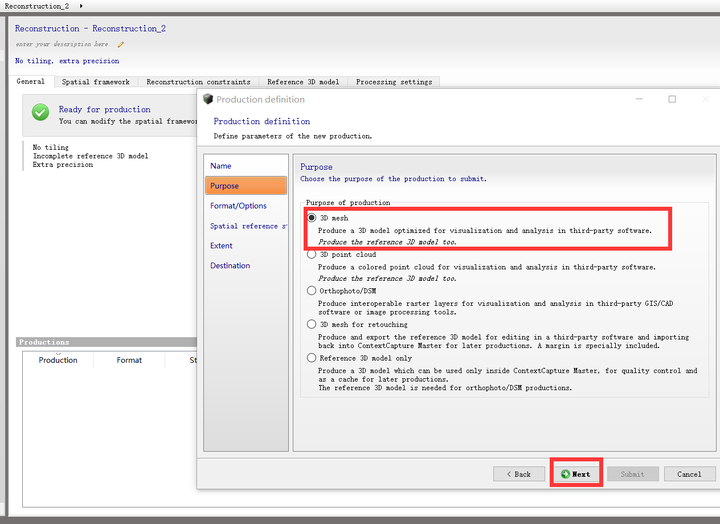
④选择"3D mesh",然后next
⑤选择需要的模型格式和模型质量
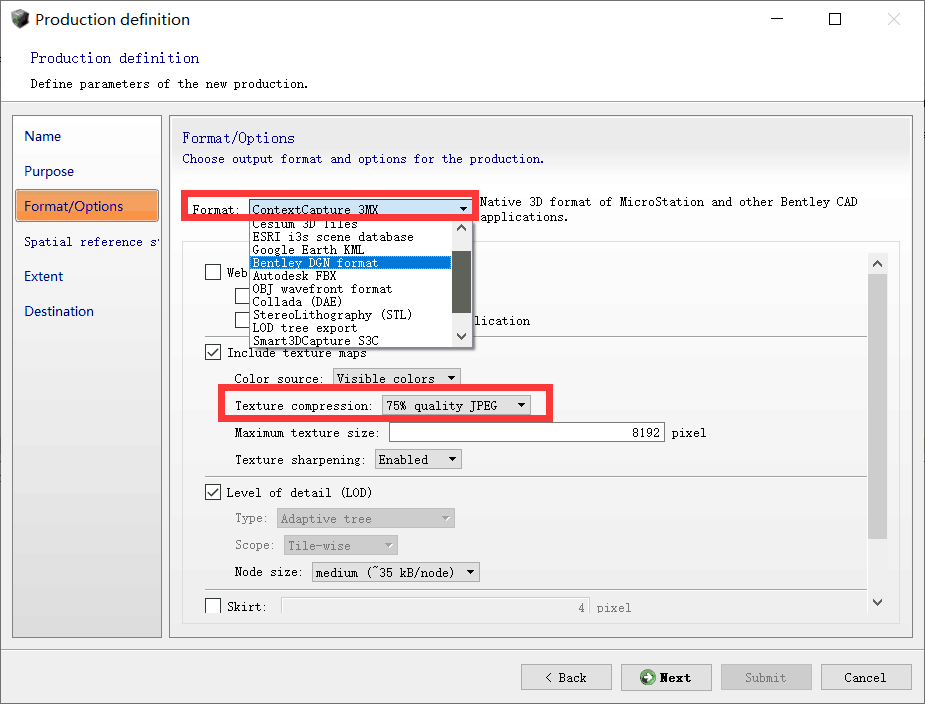
contextcapture自带的格式是3MX,可以用Acute3D Viewer(下载context capture之后自带的软件)查看模型。模型质量越高建模越慢,通常75%的质量也够用了
⑥选择好坐标系之后,点击"next",之后保持默认选项一直选择"next"即可
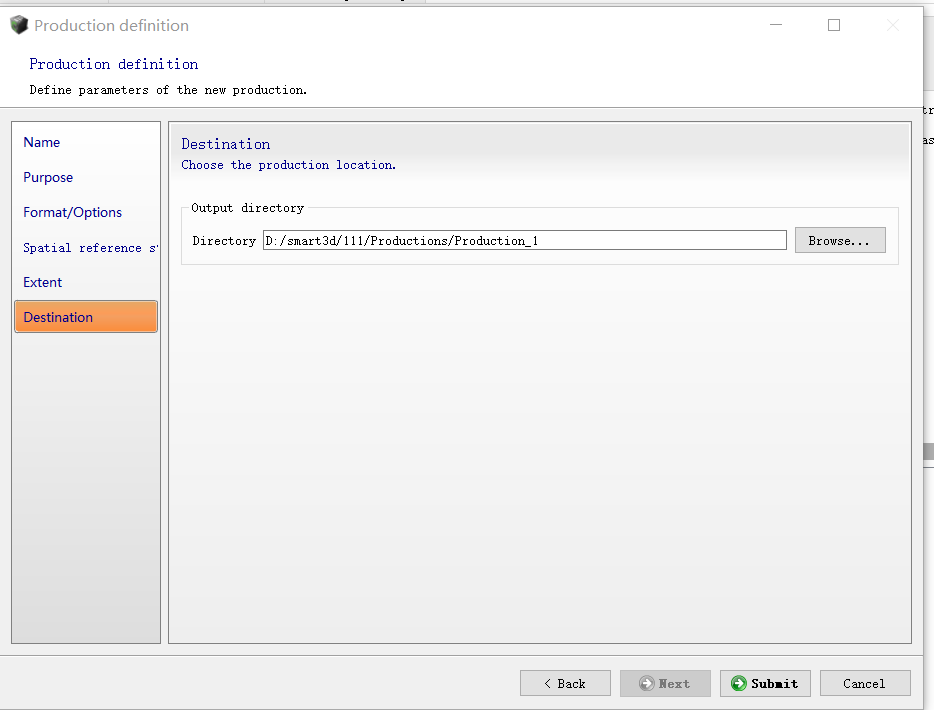
⑦选择保存位置,然后"submit"
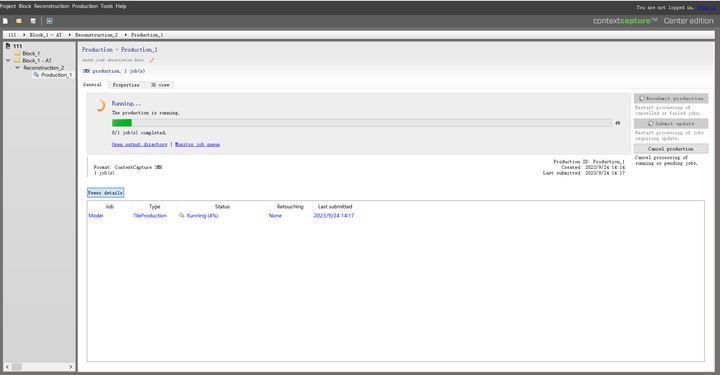
⑧保持橙色engine一直打开,等待建模。
⑨建模完成之后,如果是.3MX格式,可以点击"3D View"查看模型。
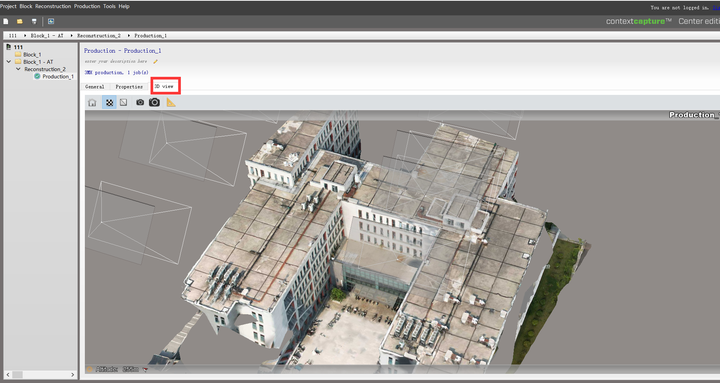
如果是常见的obj模型,合并模型见后一章。
2.注意事项:
(1)提交空中三角测量及生成点云、模型时,都记得打开橙色的 context capture center engine ,否则无法计算。
(2)不要修改橙色引擎的代码,也注意不要误触,否则建模会出问题。
(3)建议在空间框架/Spatital framework这一步对模型范围进行细致切割,减少后续计算时间。
(4)选择空间框架/Spatital framework这一步,在瓦片分割时,RAM的大小一定要小于电脑本身,否则建模过程非常慢还可能出错。
(5)软件在建模过程中崩溃时,重启橙色引擎先等待,不要立马新建新的模型。
在日常建模过程中,通常我们新建的模型都会比较大,这就需要分块建模,而常用的建模类型为obj格式,所以后续的合并模型又是一项任务,下面一章介绍模型合并的软件。
三.模型合并
3.1 合并软件及过程
1.合并软件:
· MeshLab:开源,简单好用,推荐。
2.合并模型操作流程:
(1)合并obj模型
①导入模型; ②选择之前保存模型的文件夹,分块导入。
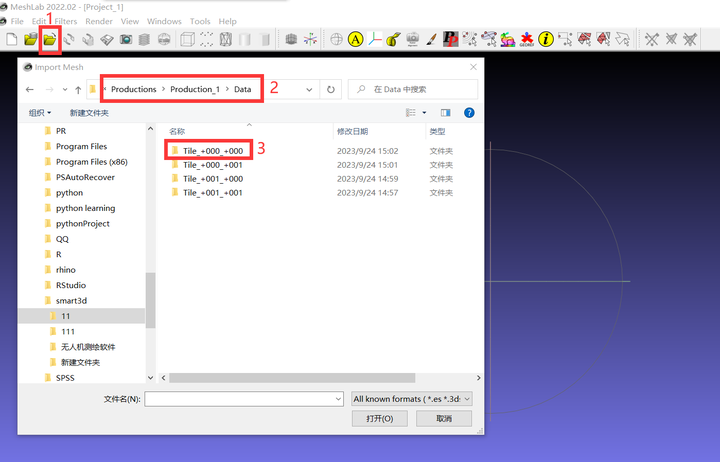
meshlab没法批量导入,需要手动导入每个tile文件夹里模型。
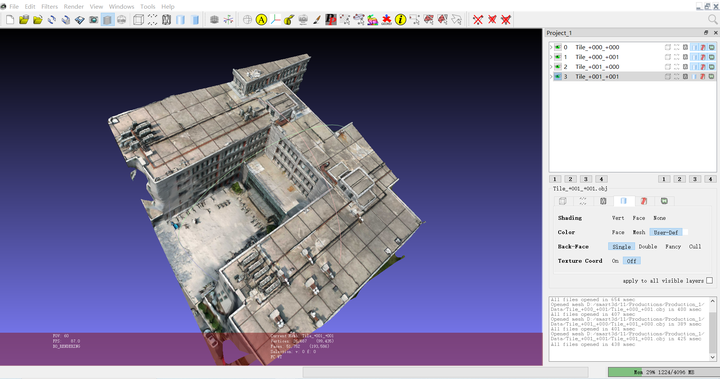
③导入后如下所示,右侧栏会显示导入的块数。
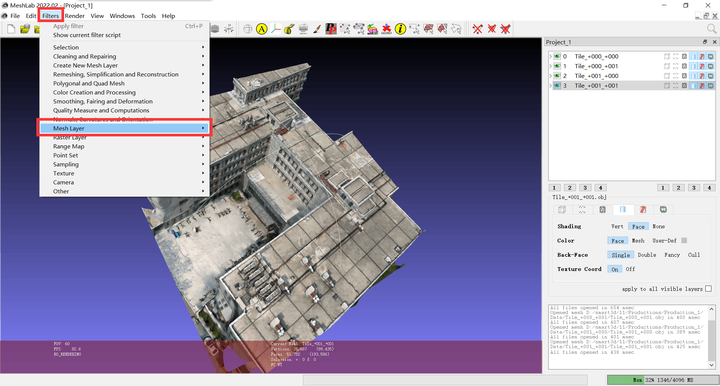
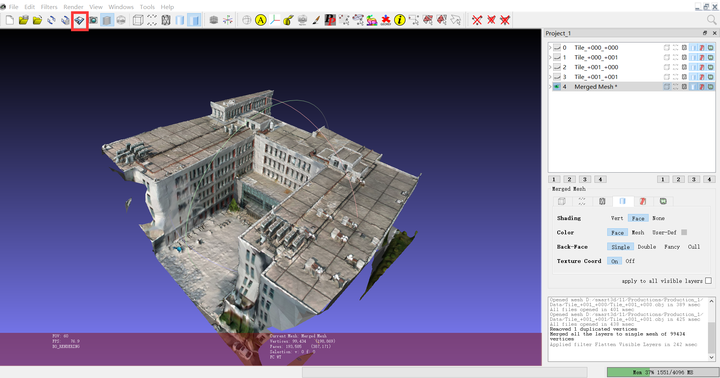
④点击"filters",选择"mesh layer",点击”flatten visible layers“。
⑤按下图取消勾选。

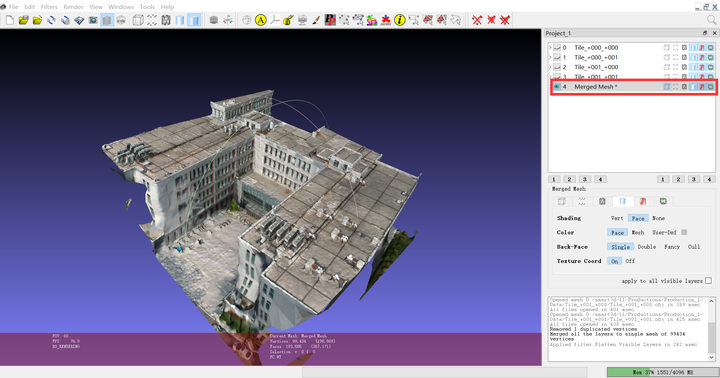
⑥最终看到合并的模型位于右侧栏。
(2)导出模型
①点击导出按钮
②选择导出的位置和格式
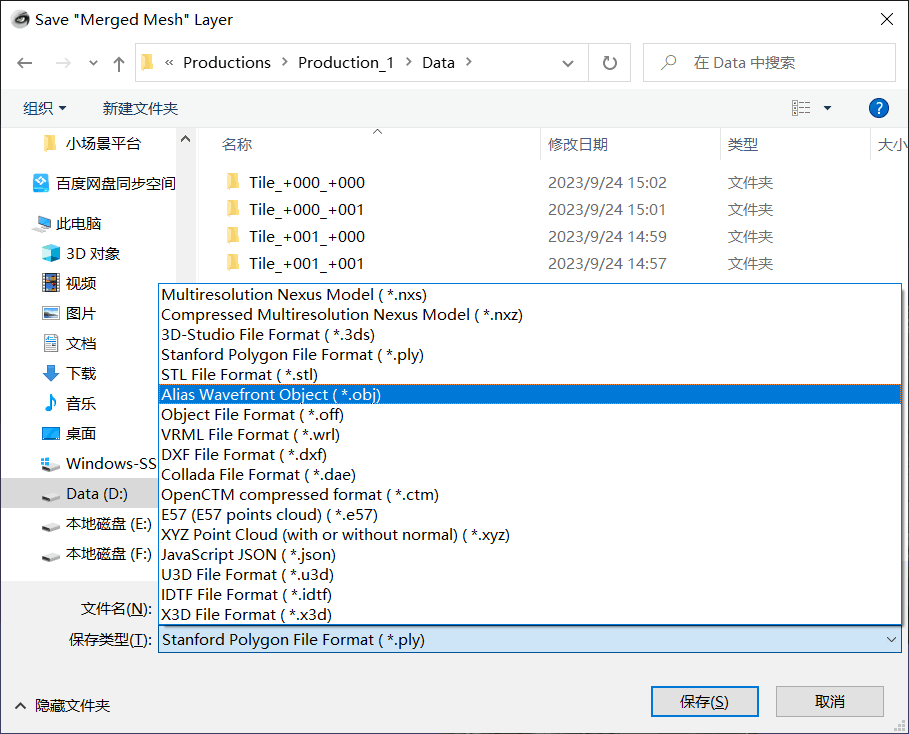
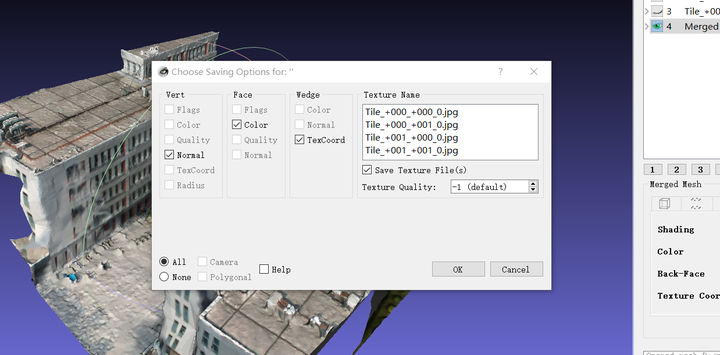
③ 按照默认选项,然后点击"OK"
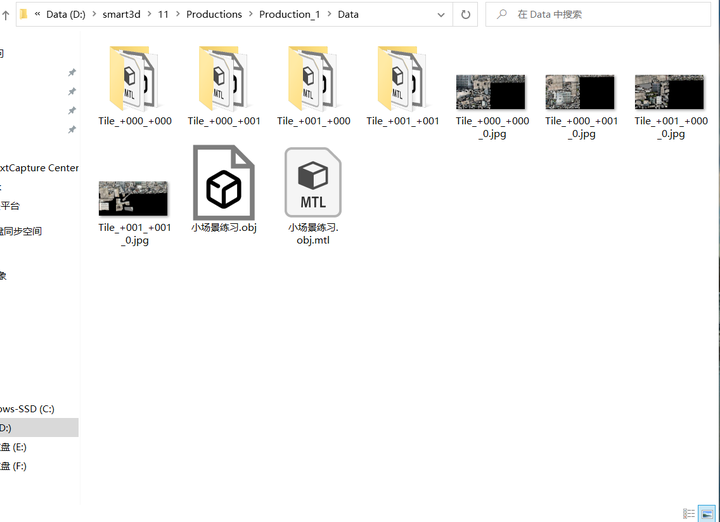
④完整模型合并成功:
全流程建模介绍结束~